 |
設定資料 |
|---|
|
競技中の動作
|
2001/02/25更新
[もどる] |
以下、■で示すリンクは、知能ロボットコンテスト2001ルールブックの該当ページ画像を指しています。
魔女子たんは、■競技台上のスタートエリアから出発して、10分以内に、競技台上にランダムにちらばっているテニスボール7個、空き缶4個、石鹸箱4個の計15個をゴールへと片付けます。
- 移動手段
ステッピングモータで車輪をまわすことにより移動します。2足歩行は今回は無理です。ごめんなさい。そのかわり、腕、頭などはサーボモータでできるだけ自由に動かせるようにします。
- ボールや壁などの位置の調べ方
ロボットの四方、床面ぎりぎりの高さに測距センサを配置し、位置推定を行います。また、■タワーの位置や状態を把握するために、補助的に人工網膜 LSIの出力画像を用います。自己位置の推定には、床面に向けて配置したラインセンサを用い、ガイドラインを検出することで行います。
- 物体の判別
人工網膜 LSIの出力画像、物体をつかんだ状態での両手の間隔、手のひらに3色LEDとCdSを配置し、LEDを各色で発光させその反射強度を検出するなどの手段で総合的に判断します。
- 石鹸箱について
片付けるもののうち石鹸箱には、それぞれ A, B, C, D のいずれかの文字が■記載されています。どの文字がかかれているかを判別するために、人工網膜 LSIの出力する画像を用います。
- ボールなどの回収手段
両手で一つ一つ持って運びます。ボール、空き缶についてはそれぞれゴール(黄)、ゴール(青)に直接捨てにいきます。石鹸箱については、1個回収する毎にゴール(赤)手前のガイドライン上に、A, B, C, D の順になるように並べていき、4個そろったらまとめてゴールに捨てます。
あ、しまった。これだと杖が持てない(T-T)
- おまけ
それっぽいものを召喚(魔女子たんがそいつをラジオコントロール)して効率的な回収をする予定。間に合えば。できたらいいなぁ。
|
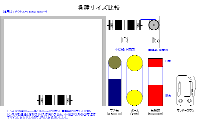
各種サイズ比較
|
2001/02/25更新
[もどる] |
それぞれの大きさを比較してみました。
画像をクリックすると拡大表示します。ああっ。スワンどこに置こう。
{kind=link}
{kind=link}
{kind=link}